Value or Policy Iteration
约 514 个字 8 张图片 预计阅读时间 3 分钟
Value Iteration¶
在 chapter 3 中,求解 Bellman optimality equation 的方法就是 value iteration:
- Policy Update:solve \(\pi_{k+1} = \operatorname{argmax}_\pi(r_\pi + \gamma P_\pi v_k)\)
- Value Update: \(v_{k+1} = r_{\pi_{k+1}} + \gamma P_{\pi_{k+1}}v_k\)
注意,这里的 \(v_k\) 并不是 state value,而是为了逼近 \(v^*\) 而构造的向量。
用 element-wise 的写法:
- Policy Update (PU):
- Value Update (VU):
伪代码:

实际上,value iteration 一般直接对 value 进行更新(隐式地维护策略),
$$
V_{k+1}(s) = \max_{a}\sum_{s'}P(s'\mid s, a) \left[ R(s,a,s') + \gamma V_{k}(s') \right]
$$
到最后接近收敛时才推算出 policy,这样效率更高:
由于直接对值函数进行更新,所以更适合大规模的任务,并且还可以在 Value-Function-Approximation 中进行扩展
Policy Iteration¶
给出一个初始 policy \(\pi_0\)
- Policy Evaluaton (PE):计算 \(\pi_k\) 的 value state \(v_{\pi_k} = r_{\pi_k} + \gamma P_{\pi_k} v_{\pi_k}\)。需要用到 Bellman equation 的求解
- Policy Improvement (PI):\(\pi_{k+1} = \operatorname{argmax}_\pi\left(r_\pi + \gamma P_\pi v_{\pi_k} \right)\)
流程:

可以证明,这样反复迭代后,\(v_{\pi_k}\) 越来越好,最终会收敛到 \(v^*\)
并且,这里的 \(v_{\pi_k}\) 是 value state,和 value iteration 中不一样.
由于每次迭代都需要对整个 policy 进行评估,所以在较大规模的任务上会效率较低
Truncated Policy Iteration¶
Value/Policy Iteration 是 truncated policy iteration 的两个特殊情况
Value iteration 和 policy iteration 非常类似:
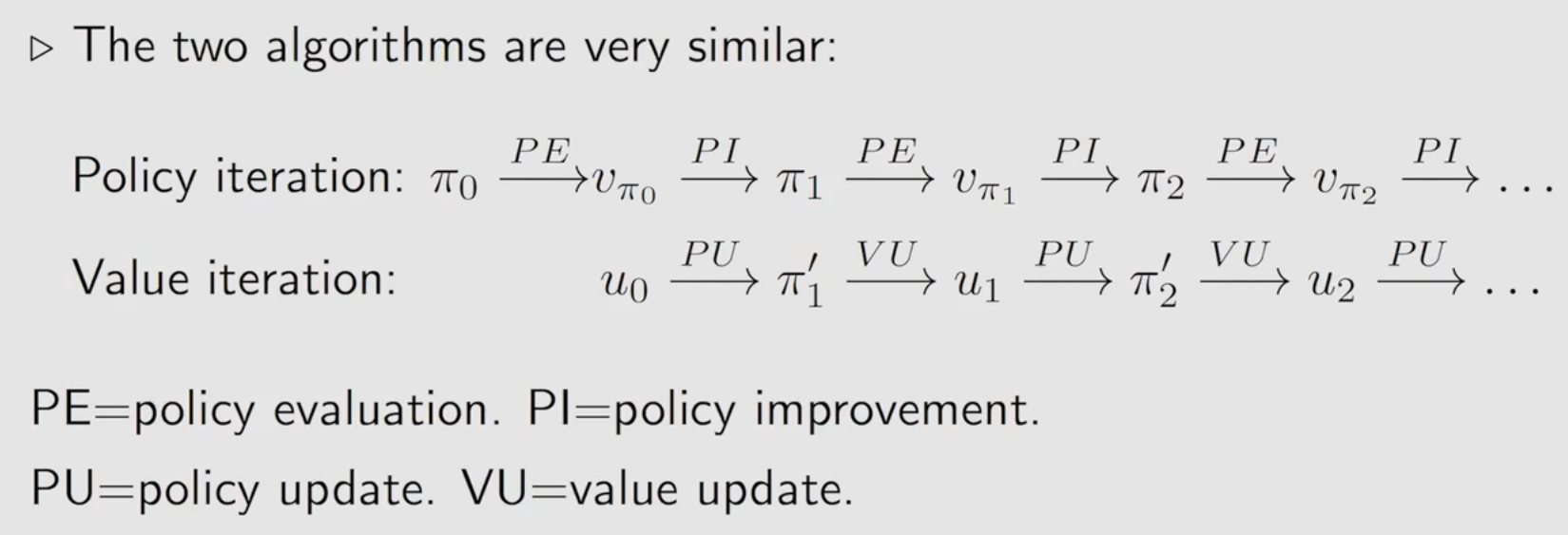
其实在 value iteration 中,只是将 Bellman equation 的迭代求解进行了一步,从 \(v_0\) 迭代到 \(v_1\),而在 policy iteration 中,则是迭代无穷步得到了 value state \(v_{\pi_1}\)。
这两者都是极端情况,且后者实际中有可能不能实现,往往只会进行有限步,即为 truncated policy iteration。


伪代码:

可以证明:

因此,迭代过程中,总会越来越好,不用担心变差的情况。
几种算法的对比:
