Temporal Difference Learning
约 998 个字 13 张图片 预计阅读时间 5 分钟
TD learning 算法是基于 Chapter 6 的一大类算法。
TD Learning of State Values¶
用于给定策略时,学习 state value,本质上是求解 Bellman equation 的一个 RM 算法
Bellman expectation equation:
对于从给定的策略 \(\pi\),得到 \((s_0, r_1, s_1, \ldots, s_t, r_{t+1}, s_{t+1}, \ldots)\),记为 \(\{ (s_t, r_{t+1}, s_{t+1}) \}\)。TD algorithm 为:
- 对 \(t = 0,1,2,\ldots\),这里 \(v_t(s_t)\) 是 \(v_\pi(s_t)\) 的估计,\(\alpha _t(s_t)\) 为 \(s_t\) 在时刻 \(t\) 的 learning rate(注意下标 \(t\) 的含义不同)
- 在 \(t\) 时刻,只有被访问到的 state \(s_t\) 被更新
- \(\overline{v}_t = r_{t+1} + \gamma v_t(s_{t+1})\) 被称为 TD target,也就是,在得到新的信息 \((s_t, r_{t+1}, s_{t+1})\) 后,可以对当前的状态 \(s_t\) 进行更新
- \(\delta_t = v_t(s_t) - \overline{v}_t\) 称为 TD error
TD learning 的收敛性定理:

TD/Sarsa learning 和 MC learning 的对比:


需要记住的是,TD 是低方差、高误差的,而 MC 是高方差、低误差的,不过可以平衡两者得到 GAE
TD Learning of Action Values¶
Sarsa¶
TD learning of action values,也就是进行 policy evaluation
和上节中的 TD learning 算法几乎一样,只是将 \(v(s_t)\) 替换为 \(q(s_t, a_t)\):
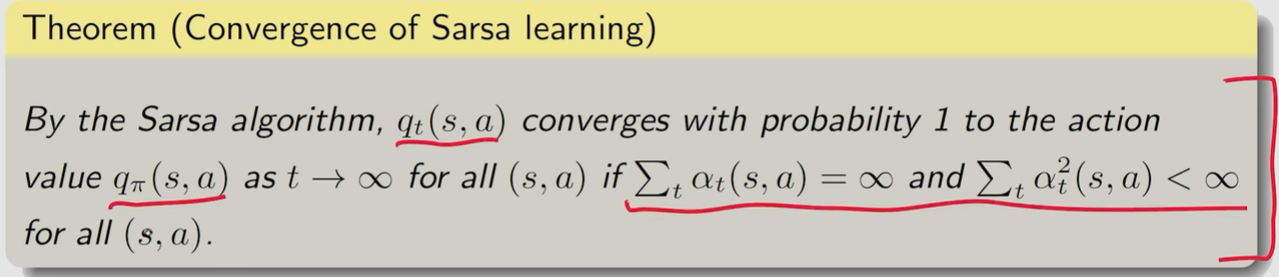
Sarsa 收敛性定理:
可以和 policy improvement 过程结合,也称为 sarsa 算法。伪代码:

Expected Sarsa¶
和上面的公式相比,将 \(q_{t}(s_{t+1},a_{t+1})\) 替换为了 \(\mathbb{E}\left[ q_{t}(s_{t+1},A) \right]\)
这里
于是只需要 \((s_t, a_t, r_{t+1}, s_{t+1})\) 四个随机变量(因为 \(a_{t+1}\) 被期望替代掉了),相对于原始的 Sarsa 算法,variance 也会变小
Expected sarsa 实际上是在求解:
也是 Bellman equation 的一个变型
N-step Sarsa¶
结合了 Sarsa 和 Monte Carlo Learning

也就是说,Sarsa 和 MC 都是 n-step Sarsa 的极端情况

分析:

TD Learning of Optimal Action Values¶
Q-learning¶
相较于 Sarsa,将 TD target 从 \(r_{t+1} + \gamma q_t(s_{t+1}, a_{t+1})\) 替换为了 \(r_{t+1} + \gamma \max _{a \in \mathcal{A}} q_t(s_{t+1}, a)\)
即 \(a_{t+1} \to \arg\max_{a\in A}q_{t}(s_{t+1},a)\)
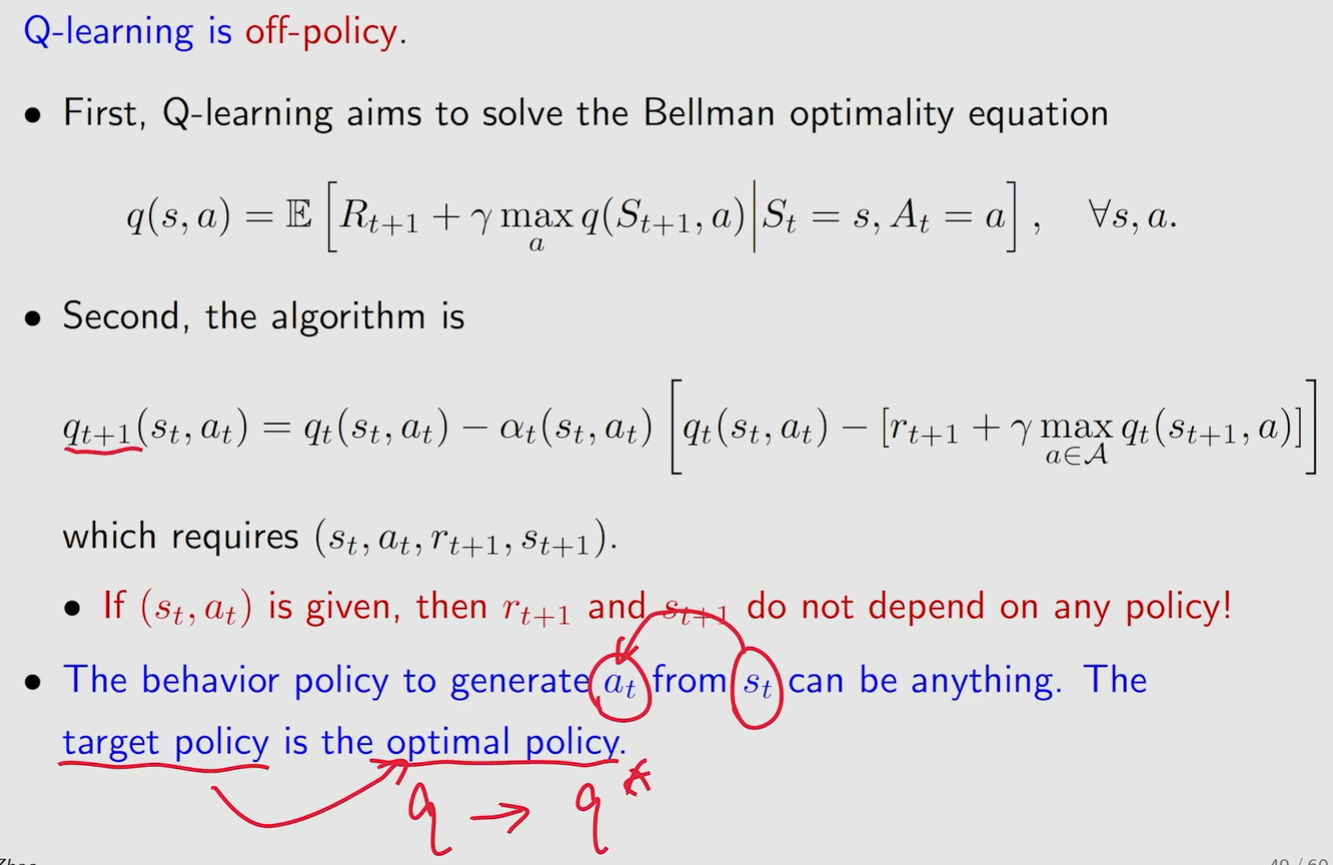
数学上,Q-learning 求解等式:
也就是 Bellman optimal equation 的变体。
Off-policy & On-policy¶
- Behavior policy:和环境交互得到 experience 的策略
- Target policy:目标中一直更新,想要得到最优的策略
- On-policy:behavior policy 和 target policy 相同
- Off-policy:behavior policy 和 target policy 不同
Sarsa 和 MC 都是 on-policy 的。而 Q-learning 是 off-policy 的.
- On-policy: \(\pi \rightarrow \text{experience} \rightarrow \text{some information} \rightarrow \text{new } \pi \rightarrow \cdots\)
- Off-policy: \(\text{behavior policy } \pi_{\beta} \to \text{experience} \to \text{some information} \to \text{new target policy } \pi_{\tau} \to \cdots\)
伪代码:

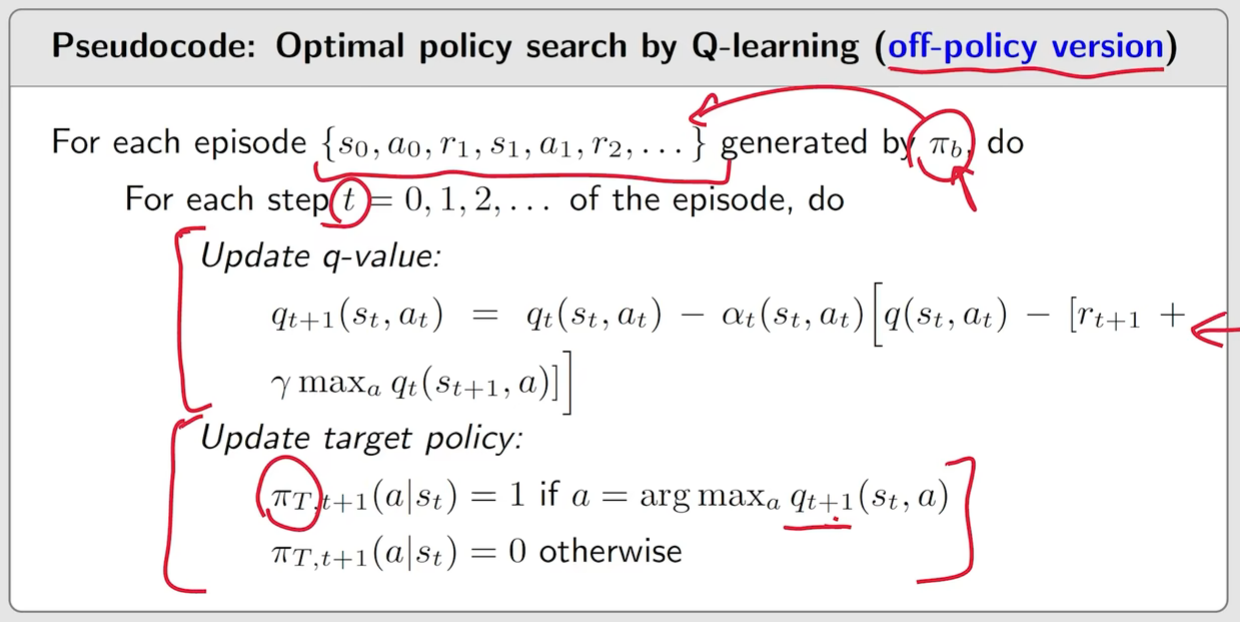
在 off-policy 中:
- \(\pi_b\):behavior policy,是任意选取的,因此也不需要 \(\epsilon\) -greedy 进行 PI (policy improvement),只需要用 greedy 就行
- \(\pi_{\tau}\):target policy
由于 off-policy 的性质,Q-learning 可以和深度学习相结合
几种算法的对比¶

