Policy Function Approximation
约 678 个字 2 张图片 预计阅读时间 3 分钟
和 value function approximation 类似,都是引入参数 \(\theta\),\(\pi (a | s) \rightarrow \pi (a | s, \theta)\)
Metrics to Define Optimal Policies
Average state value:
\[ \overline{v}_\pi = \sum_{s \in S}^{} d(s) v_\pi (s) = \mathbb{E}[v_\pi (s)] = d^T v_\pi = \mathbb{E}\left[ \sum_{t=0}^{\infty} \gamma ^t R_{t+1} \right] \]
选取概率向量 \(d\):可以简单假设为 uniform 的,或者服从 stationary distribution。
Average reward:
\[ \overline{r}_\pi = \sum_{s \in S}^{} d_\pi (s) r_\pi (s) = \mathbb{E}[r_\pi (S)], S \sim d_\pi \]
这里
\[ \begin{align*} r_\pi (s) &= \sum_{a \in A}^{} \pi (a | s) r(s,a) \\ r(s, a) &= \mathbb{E}[R|s,a] =\sum_{r}^{} rp(r | s,a) \end{align*} \]
容易得到
\[ \overline{r}_\pi = \lim_{n \to \infty} \frac{1}{n}\mathbb{E}\left[ \sum_{k=1}^{n}R_{t+k}|S_t = s_0 \right] = \lim_{n \to \infty} \frac{1}{n} \mathbb{E}\left[ \sum_{k=1}^{n} R_{t+k} \right] \]
上述两个 metric 都为策略 \(\pi\) 的函数,也就是参数 \(\theta\) 的函数。自然的想法是,每一步的平均价值/奖励要尽可能的大。所以可以训练 \(\theta\) 使得 \(\overline{v}_\pi\) 和 \(\overline{r}_\pi\) 最大(梯度上升)。
这两个 metric 是等价的:\(\overline{r}_\pi = (1 - \gamma)\overline{v}_\pi\)
Gradients of the Metrics
\[ \begin{align*} \nabla _\theta J(\theta) &=\mathbb{E}_{s \sim \eta (s)}\left[\mathbb{E}_{a \sim \pi_{\theta}(s)}[q_{\pi}(s,a)]\right] \\ &= \mathbb{E}_{s \sim \eta (s)}\left[ \sum_{a \in A} \pi (a|s, \theta) q_{\pi} (s,a) \right] \\ & =\sum_{s \in S}^{} \eta (s) \sum_{a \in A}^{} \pi (a | s, \theta) q_\pi (s,a) \end{align*} \]
这里 \(q_{\pi } (s,a)\) 也可以取很多其他的值
推导:
\[ \nabla _\theta \overline{r}_\pi = \sum_{s}^{} d_\pi (s) \sum_{a}^{} \nabla _\theta \pi (a | s, \theta) q_\pi (s, a) \]
其余 metric 同理。
上述 gradient 的一个变型为:
\[ \nabla _\theta J(\theta) = \mathbb{E}\left[ \nabla _\theta \ln \pi (A|S, \theta) q_\pi (S,A) \right] \]
这里 \(S \sim \eta, A \sim \pi (A|S, \theta)\),使用了梯度 \(\ln\) 转期望的 trick
Gradient-ascent Algorithm (REINFORCE)
\[ \begin{align*} \theta _{t+1} &= \theta _t + \alpha \nabla _\theta J(\theta) \\ &= \theta _t + \alpha \mathbb{E}\left[ \nabla _\theta \ln \pi (A|S, \theta _t) q_\pi (S,A) \right] \\ &\rightarrow \theta _t + \alpha \nabla _\theta \ln \pi (a|s, \theta _t) q_\pi (s,a) \end{align*} \]
为了进行 SGD,需要采样 \(s\) 和 \(a\),而 \(S \sim d\) (long-run behavior under \(\pi\)),进而 \(a_t \sim \pi (s, \theta_t)\)
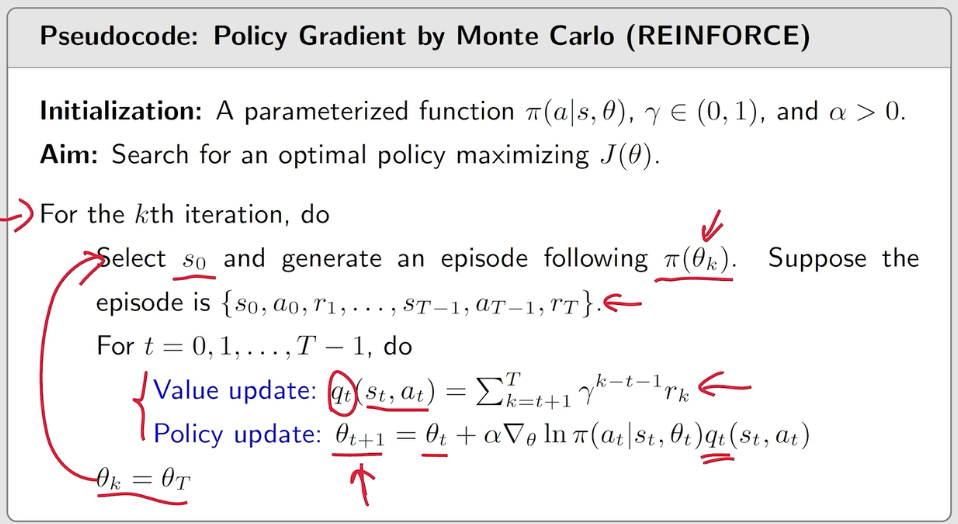
由于 \(q_\pi\) 未知,可使用 MC (此时称为 REINFORCE 算法) 或 TD learning (此时称为 actor-critic 算法) 用 \(q_t\) 近似 \(q_\pi\)
\[ \begin{align*} \theta _{t+1} &\rightarrow \theta _t + \alpha \nabla _\theta \ln \pi (a_t|s_t, \theta _t) q_t (s_t,a_t) \\ &= \theta _t + \alpha \left( \frac{q_t(s_t, a_t)}{\pi (a_t | s_t, \theta _t)} \right) \nabla _\theta \pi (a_t | s_t, \theta _t) \\ &:= \theta _t + \alpha \beta _t \nabla _\theta \pi (a_t | s_t, \theta _t) \\ \end{align*} \]
还可以得到:
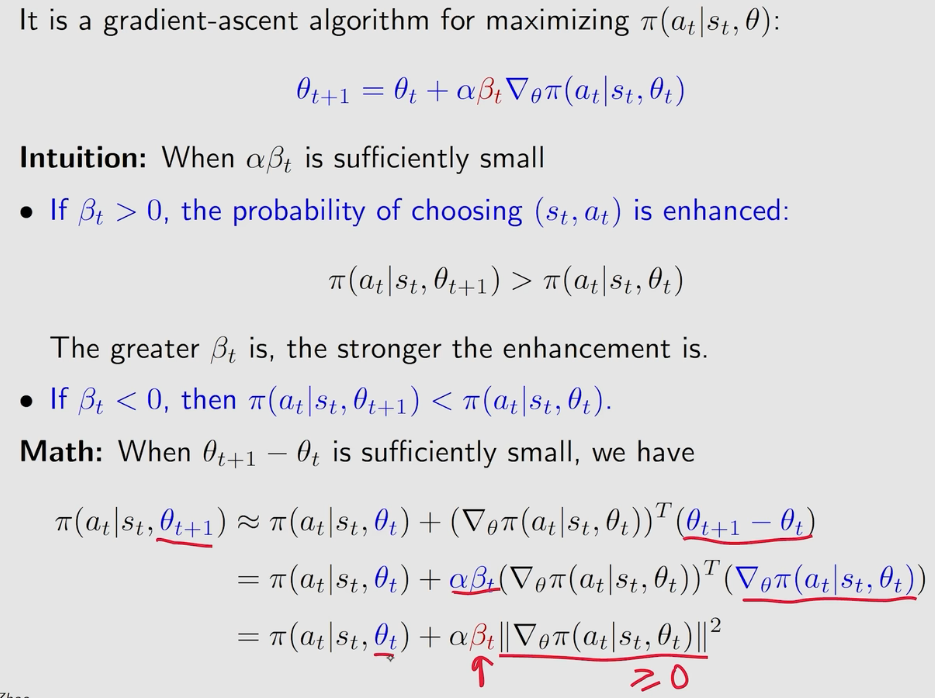
\(\beta_t\) 可以用于平衡 exploration 和 exploitation:
- \(q_t(s_t, a_t)\) 越大,\(\beta _t\) 越大,也就是 value 越大,学习的步长越大,exploitation 就越强
- \(\pi (a_t | s_t, \theta_t)\) 越小,\(\beta _t\) 越大,也就是在概率小的 action 上进行 exploration
REINFORCE 伪代码: