Monte Carlo Learning
约 465 个字 6 张图片 预计阅读时间 2 分钟
主要思想:

也就是用大量重复的取样来代替 model(model free)
可以将蒙特卡洛方法引入 policy iteration,代替计算 \(q_{\pi_k}\) 的步骤:
\[ q_{\pi_k}(s,a) = \mathbb{E}\left[G_t | S_t = s, A_t = a\right] \]
从 \((s,a)\) 出发,大量采样 \(G_t\),从而进行估计。
MC Basic¶
伪代码:
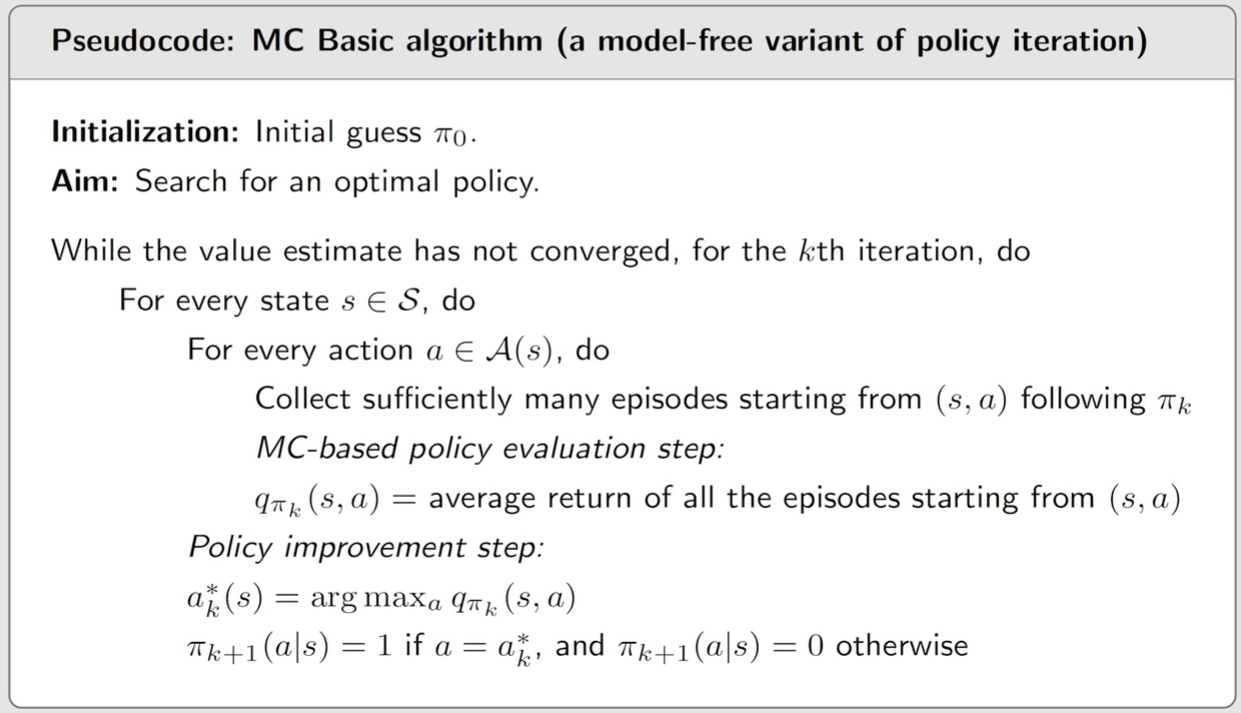
- MC basic 是 policy iteration algorithm 的一个变体
- model-free algorithm 是在 model-based algorithm 基础上构建的
- MC basic 效率很低,无法实用
- 当 \(G_t\) 的 episode length 较小时,只有靠近 target 的 state 会学习到较好的策略;随着 length 增大,较远的 state 也能找到最优策略。
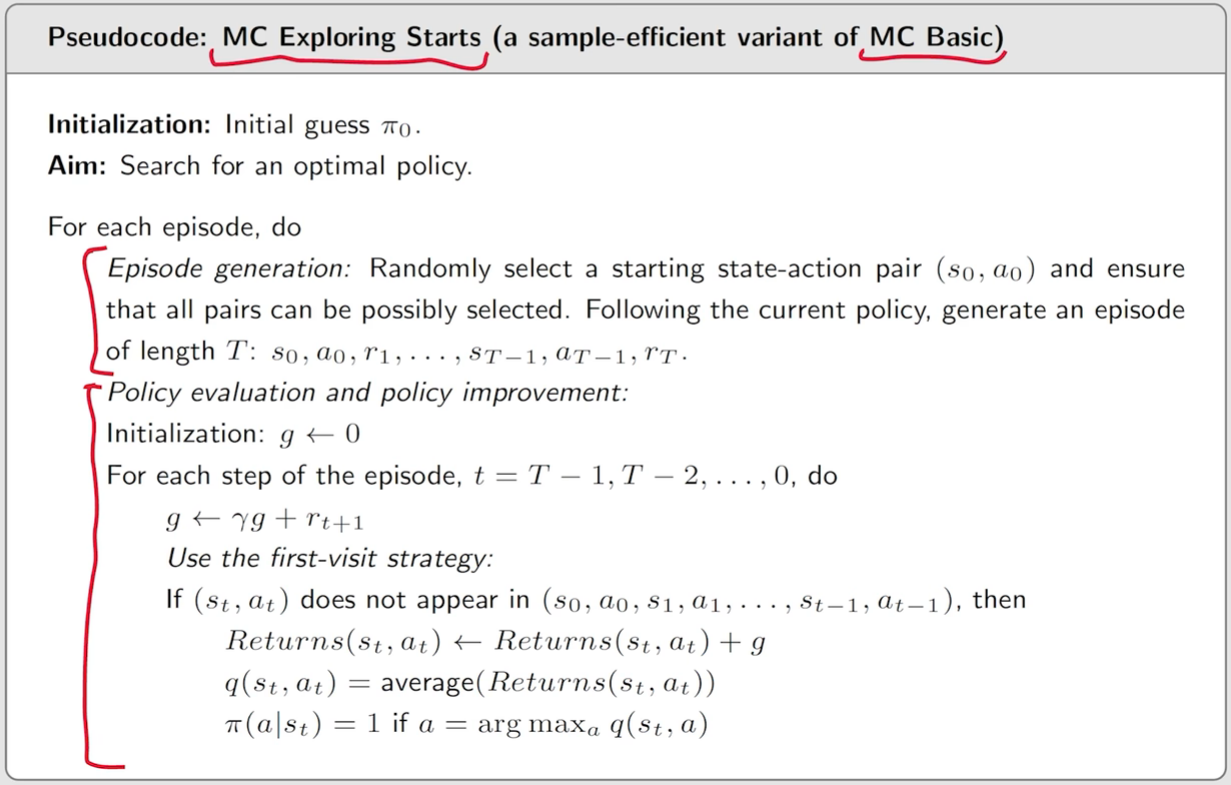
MC Exploring Starts¶
main idea: 重复利用每一条 episode。

伪代码:
MC without Exploring Starts¶
由于实际中不一定每一个 start 都能被设置(或者因为太麻烦),所以可以采用 soft policy:因为采取任意一个 action 的概率都是 positive 的。这样只需要在几个 start 开始取样足够长的 episode 就可以覆盖到其它的 state。
可以使用 \(\epsilon\)-greedy 算法:
\[ \pi(a|s) = \begin{cases} 1 - \frac{\epsilon}{|\mathcal{A}(s)}(|\mathcal{A}(s) -1|), & \text{for greedy action} \\ \frac{\epsilon}{|\mathcal{A}(s)|}, & \text{for the orhter}\space |A(s)| - 1 \space \text{actions} \end{cases} \]
这里 \(\epsilon \in [0,1]\)。这样就可以 balance exploitation and exploration。
- \(\epsilon = 0\):完全 greedy
- \(\epsilon = 1\):成为 uniform distribution, exploration 最强
在之前的 policy iteration 中,policy improvement:
\[ \pi_{k+1}(s) = \operatorname{argmax}_{\pi \in \Pi} \sum_{a \in \mathcal{A}}^{} \pi(a|s)q_{\pi_k}(s,a) \]
这里 \(\Pi\) 是所有可能的策略集合。可以将 \(\Pi\) 限制为所有 \(\epsilon\)-greedy 策略的集合 \(\Pi_\epsilon\),从而引入 \(\epsilon\)-greedy 算法:
\[ \pi_{k+1}(s) = \operatorname{argmax}_{\pi \in \Pi_\epsilon} \sum_{a \in \mathcal{A}}^{} \pi(a|s)q_{\pi_k}(s,a) \]
可以得到,这样的更新结果为:
\[ \pi_{k+1}(a|s) = \begin{cases} 1 - \frac{|\mathcal{A}(s)| - 1}{|\mathcal{A}(s)|}\epsilon , & a = a^*_k \\ \frac{1}{|\mathcal{A}(s)|} \epsilon, & a \neq a^*_k \end{cases} \]
伪代码:

优势/劣势:
