Actor Critic
约 678 个字 6 张图片 预计阅读时间 3 分钟
The Simplest Actor-critic (QAC)
Actor (policy update):在 Policy-Function-Approximation 中的算法,用来更新 policy 参数 \(\theta\)、实施 policy 与环境交互
\[ \theta _{t+1} =\theta _t + \alpha \nabla _\theta \ln \pi (a_t|s_t, \theta _t) q_t (s_t,a_t) \\ \]
Critic (value update):用于估计 \(q_t \approx q_\pi\) 的算法,即评判当前策略到底好不好,和参数 \(w\) 相关
伪代码:
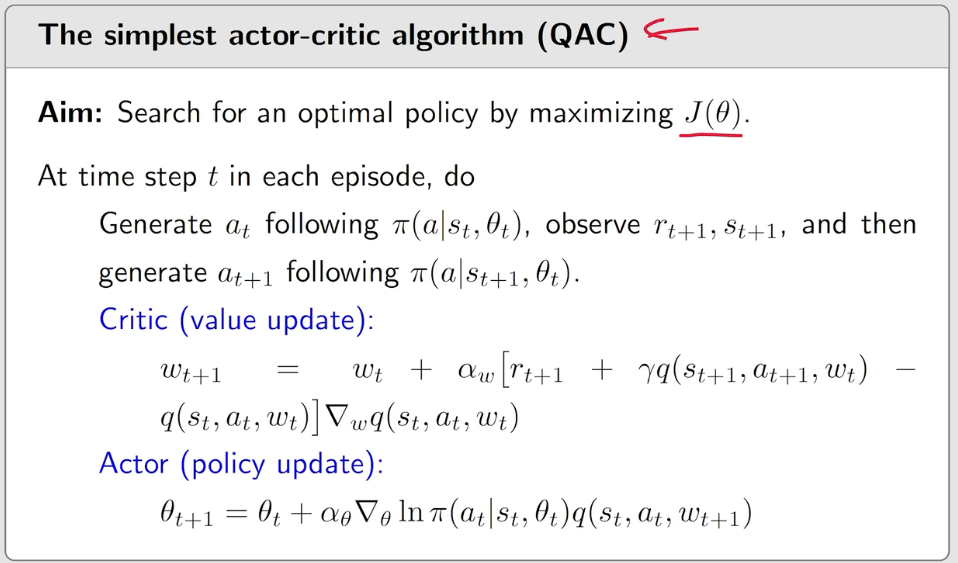
Critic 中使用了 sarsa + value function approximation
该算法是 on-policy 的。
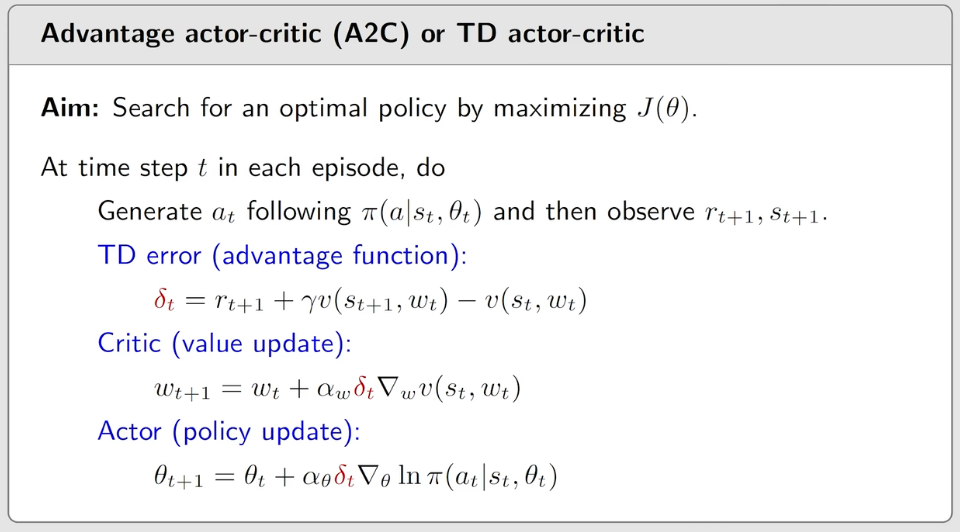
Advantage Actor-critic (A2C)
通过引入一个 bias 来减少方差,同时保持期望:
\[ \begin{align*} \nabla _\theta J(\theta) &= \mathbb{E} _{S \sim \eta, A \sim \pi} \left[ \nabla _\theta \ln \pi (A|S, \theta_t)q_\pi (S, A) \right] \\ &= \mathbb{E} _{S \sim \eta, A \sim \pi} \left[ \nabla _\theta \ln \pi (A|S, \theta_t)(q_\pi (S, A) - b(S)) \right] \end{align*} \]
这样采样的时候,误差也会更小。
可以推导出最好的 \(b(S)\) 为:
\[ b(S) = \frac{\mathbb{E}_{A \sim \pi}\left[ \Vert \nabla _\theta \ln \pi (A | s, \theta_t) \Vert ^2 q(s,A) \right]}{\mathbb{E}_{A \sim \pi}[\Vert \nabla _\theta \ln \pi (A | s, \theta_t)\Vert ^2]} \]
太复杂,在实际中可以去除权重,简化为
\[ b(s) = \mathbb{E}_{A \sim \pi}[q(s, A)] = v_\pi (s) \]
此时
\[ \nabla _\theta J(\theta) = \mathbb{E} _{S \sim \eta, A \sim \pi} \left[ \nabla _\theta \ln \pi (A|S, \theta_t)(q_\pi (S, A) - v_\pi (S)) \right] \]
记 \(\delta _\pi (S, A) = q_\pi (S,A) - v_\pi (S)\),称为 advantage function。直观理解为,在某一个状态下,状态所带来的价值只有可能在一个很小的范围内,但是可以通过选择不同的 action 来相对提升 reward(比方说打牌的时候拿到一手烂牌,技术好的话,就可以用好的出牌策略减小损失/增大收益)
stochastic version:
\[ \begin{align*} \theta_{t+1} &= \theta_t + \alpha \nabla _\theta \ln \pi (a_t | s_t, \theta_t) [ q_t(s_t, a_t) - v_t (s_t)] \\ &= \theta_t + \alpha \nabla _\theta \ln \pi (a_t | s_t, \theta_t) \delta _t (s_t, a_t) \\ &= \theta_t + \alpha \left( \frac{\delta _t (s_t, a_t)}{\pi (a_t | s_t, \theta_t)} \right) \nabla _\theta \pi (a_t| s_t, \theta_t) \end{align*} \]
显然 \(\delta_t (s_t, a_t)\) 比 \(q_t (s_t, a_t)\) 更好,因为在乎的是相对大小。
进一步,对 \(\delta _t\) 可以进行近似:
\[ \delta _t = q_t(s_t, a_t) - v_t (s_t) \rightarrow r_{t+1} + \gamma v_t (s_{t+1}) - v_t (s_t) \]
从而减少参数量。
伪代码:
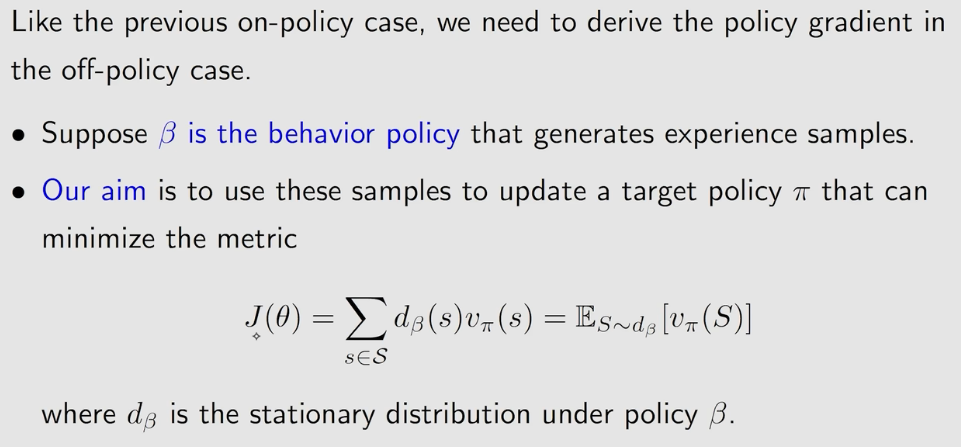
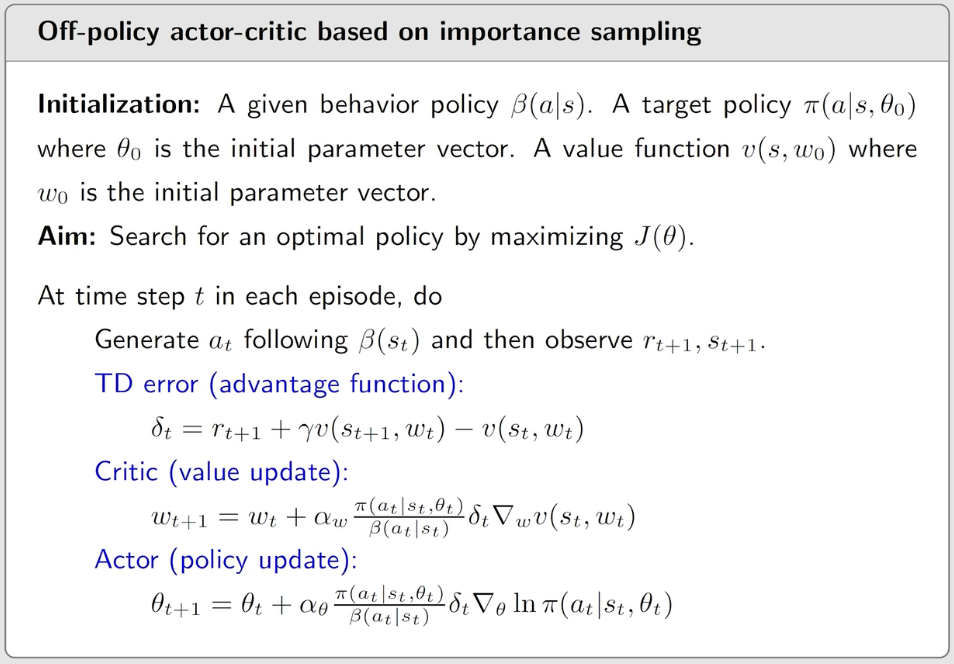
Off-policy Actor-critic
使用 importance sampling trick 可以将 actor-critic 算法改为 off-policy 的,
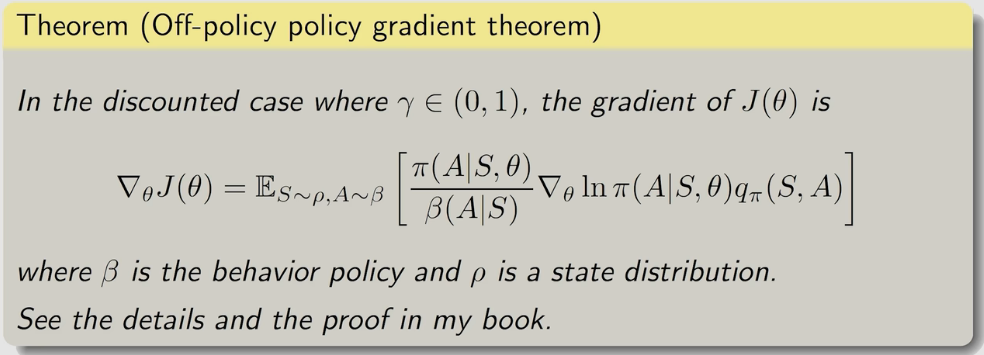
off-policy gradient theorem

伪代码:
Importance Sampling
目标:通过 \(X \sim p_1\) 求 \(\mathbb{E}_{X \sim p_0}[X]\)
\[ \mathbb{E}_{X \sim p_0}[X] = \sum_{x} xp_0(x) = \sum_{x} p_1(x) \frac{p_0(x)}{p_1(x)} x := \sum_{x} p_1(x) f(x) = \mathbb{E}_{X \sim p_1}[f(X)] \]
而 \(\mathbb{E}_{X \sim p_1}[f(X)]\) 可以用经验期望来估计,所以
\[ \mathbb{E}_{X \sim p_0}[X] \approx \frac{1}{n} \sum_{i=1}^{n}\frac{p_0(x_i)}{p_1(x_i)}x_i \]