Score-based Model
约 1390 个字 4 张图片 预计阅读时间 7 分钟
在 Energy-Based-Model-(EBM) 中,使用了 score function 和 Score-Matching 技术进行训练。可以拓展到更广的模型上,即为 score-based model
Training¶
Score-Matching¶
定义 score function: \(s_{\theta}(x)=\nabla_{\theta}\log(p_{\theta}(x))\),score matching: \(\mathbf{E}_{x \sim p_{data}}\left[\frac{1}{2}\lVert s_{\theta}(x) \rVert^{2} + \mathrm{tr}(\nabla_{x}s_{\theta}(x)) \right]\)
可以直接利用最小化 Fisher divergence 进行训练。缺点:计算 \(\mathrm{tr}(\nabla_{x}s_{\theta}(x))\) 非常 expensive(二阶导,结果是 Hessian 矩阵,分别计算对角线元素时间复杂度 \(O(d)\)),下述方法可以避免计算二阶导数。
Denoising Score Matching¶
先给原始分布加上噪声得到新的分布,然后尝试拟合新的分布,并在采样的时候进行 denoising
考虑
\(q_{\sigma}(\tilde{x})\) 是 \(p(x)\) 的一个近似,且计算 \(\nabla_{\tilde{x}}\log q_{\sigma}(\tilde{x})\) 更容易(相较于真实数据分布的 score function \(\nabla_{x}\log p_{data}(x)\))

当噪声程度较小时,近似得也就越好,即 \(q_{\sigma}(\tilde{x})\approx p(\tilde{x})\)。此时 Fisher divergence 变为:
直观理解:在给定的一个 \(x\) 处,结合 \(x\) 这个信息,估计附近的 score function
推导如下:
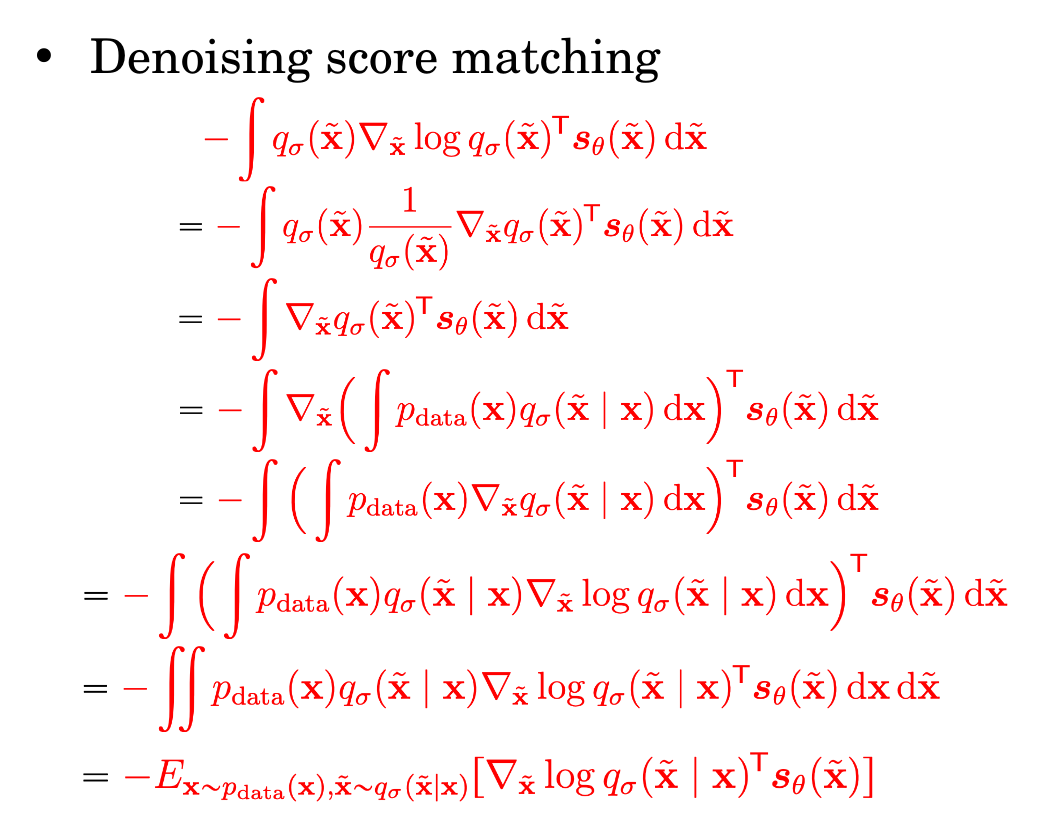

并且
便于计算。另外,这表明此时 score function 的方向就是添加的 noise 的反方向,沿 score function 走,就能消除 noise
于是 training 变为
- 取样 \(\{ x_{1}, \dots,x_{n} \}\sim p_{data}(x)\)
- 取样 \(\{ \tilde{x}_{1},\dots,\tilde{x}_{n} \}\sim q_{\sigma}(\tilde{x}), \tilde{x}_{i} \sim q_{\sigma}(\tilde{x}_{i}|x_{i})\),需要取 \(\sigma\) 足够小
- 最小化 Fish divergence (SGD):
$$
\begin{align}
& \quad \frac{1}{2n}\sum_{i=1}^{n} [\lVert s_{\theta}(\tilde{x}{i}) - \nabla}}\log q_{\sigma}(\tilde{x{i}|x] \}) \rVert^{2}*{2
& = \frac{1}{2n} \sum{i=1}^{n} \sum_{i=1}^{n} \left[\left\lVert s_{\theta}(\tilde{x}})-\frac{\tilde{x{i}-x_{i}}{\sigma^{2}} \right\rVert \right] \}^{2
& \leftrightarrow \frac{1}{2} \mathbb{E}{x \sim p(x)} \mathbb{E} \sim q{\sigma}(\tilde{x}| x)} \left[\left\lVert \frac{x - \tilde{x}}{\sigma^{2}} - s_{\theta}(\tilde{x} \}) \right\rVert^{2} \right] + \text{const
& = \frac{1}{2}\mathbb{E}*{x \sim p_{data}, z \sim \mathcal{N}(0, I)}\left[\left\lVert s_{\theta}(x + \sigma z) + \frac{z}{\sigma} \right\rVert _{2}^{2} \right]
\end{align}
$$
这里 \(\mathbb{E}_{x \sim p(x)}\) 代表从真实的数据分布中取样,而 \(\mathbb{E}_{\tilde{x} \sim q_{\sigma}(\tilde{x} | x)}\) 则代表向 \(x\) 中加入噪声;\(\frac{\tilde{x}- x}{\sigma^{2}}\) 则是通过加入一点点轻微的扰动来估计真实的梯度(从而替代了二阶导数的计算),从而和模型预测的梯度 \(s_{\theta}(\tilde{x})\) 作比较;\(s_{\theta}(\tilde{x})\) 试图模拟这种扰动。
缺点:实际上 score function \(s_{\theta}(x)\) 是在拟合 \(\nabla_{x}\log q_{\sigma}(x)\) 而不是 \(\nabla_{x}\log p_{data}(x)\)
Pitfalls¶
- 当 \(\sigma \to 0\) 时,loss 的方差会非常大
Slicing Score Matching¶
考虑将高维问题转化为一维问题:每次都随机将所有 score function 投影到一个方向上,然后在该方向上拟合 score function。Sliced Fisher divergence:
\(p_{v}\) 可以使用 Gaussian 等分布。进行和之前方法一样的操作,得到转化后的 sliced Fisher divergence:
由于可以一次性算出 \(v^{\top}\nabla_{x}s_{\theta}(x)v=v^{\top}\nabla_{x}(v^{\top}s_{\theta}(x))\),如下图,一次反向传播就够了

Sampling¶
Langevin Dynamics Sampling¶
数学理论见 Langevin Dynamics
- sample \(x^{0} \sim \pi(x)\)
- Repeat for \(t=1,2,\dots,T:\)
- \(z^{t} \sim \mathcal{N}(0,I)\)
- \(x^{t} \leftarrow x^{t-1} + \frac{\epsilon}{2} \nabla_{x} \log p_{}(x^{t-1}) + \sqrt{\epsilon }z^{t}\)
- If \(\epsilon \to 0\) and \(T \to \infty\), then we are guaranteed to get \(x^{T} \sim p(x)\)
这里第四行就是沿着 score function 的方向前进,途中带一点随机性,以期消除掉 noise(即为 denoising 过程)。为什么成立:因为 score function 就是指向了 log-likelihood 增大的方向,自然 likelihood 大的地方更容易被达到,而 likelihood 小的地方就不容易被达到。
Annealed Langevin Dynamics Sampling¶
Pitfalls¶
- 真实数据的 score function 是人为假设的,实际上存不存在无法保证
- 在 low data density 的区域表现较差
- slow mixing of Langevin dynamics between data modes
可以使用 Gaussian-Perturbation 来同时解决这三个问题。
Conditional Generation¶
可以在生成时加入标签,控制噪声的产生 \(\epsilon_{\theta}(x_{t}, t) \to \epsilon _{\theta }(x_{t}, t;y)\),此时的 score function
而 \(p_{\theta}(y|x)\) 可以由一个神经网络计算,故新的 score function 是可以直接计算的,意味着对一个已经训练好的 score model,可以“插入”任意一个 conditional model.